Ученые-исследователи Московского физико-технического института разработали новый метод планирования движений робота-гуманоида, основанный на алгоритмах искусственного интеллекта.
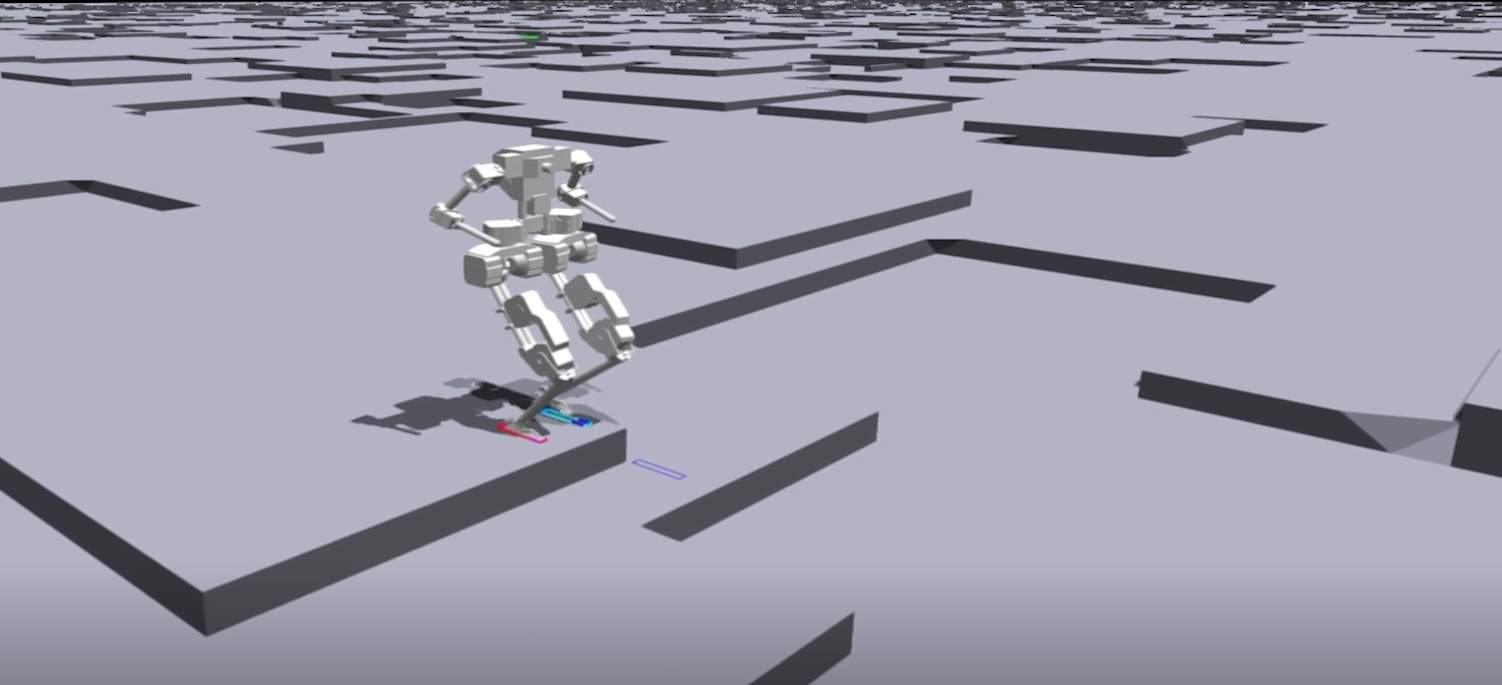
Их робот умеет уверенно передвигаться, точно рассчитывая положение своих ступеней и высоту шага, преодолевать препятствия высотой до половины от длины его ноги и поддерживать темп перемещения около 3 км/ч.
Как рассказал один из авторов разработки, аспирант и ведущий инженер лаборатории интеллектуальных технологий робототехники Института искусственного интеллекта МФТИ Вильям Сулиман, в основе метода лежит изменение парадигмы управления роботом с задания его целевой скорости на задание целевых положений стоп.
– Нейронная сеть, управляющая моторами робота, учит его точно ставить стопы в спланированное положение, – сказал Вильям Сулиман. – Таким образом мы разделяем восприятие и управление, делая систему более предсказуемой и безопасной. На первом этапе встроенный компьютер анализирует данные с камеры об окружающей обстановке и рельефе. После чего генерирует целевые позиции для совершения роботом шагов. Затем политика управления посылает сигналы на моторы робота таким образом, чтобы он следовал запланированной траектории.
Главная особенность алгоритма – использование двухшагового предвидения. Это значит, что робот планирует не только следующий шаг, но и последующий, что значительно улучшает стабильность его походки на неровной поверхности.
– Изучение стратегий упреждения показало, что планирование всего на один шаг вперед определяет «близорукое» поведение устройства, когда машина не успевает вовремя остановиться перед препятствием или пропастью, – отметил Вильям Сулиман. – Планирование на два шага вперед дает машине достаточный запас времени для адаптации к смене рельефа и командам скорости.
Роботы-гуманоиды – это перспективная платформа, которая потенциально востребована в различных сферах жизни людей – от индустрии обслуживания до изучения неизведанных миров. По мнению ученых, человекоподобные роботы эффективнее своих колесных «сородичей» при эксплуатации в помещениях с лестницами, узкими проходами и другими препятствиями. Они могут применяться для решения задач помощи по дому, ухода за пожилыми и людьми с ограниченными возможностями, а также при проведении поисково-спасательных операций.
Мона Платонова.
Фото minobrnauki.gov.ru